方位角コースの決定方法。 生き残るための科学-方位角と方位角運動
方位角は直接または逆にすることができます。
直接方位は時計回りに0°からカウントされます。 観察者から被験者への方向を示します。
逆方位は、被写体から観察者への方向を示します。
逆方位を取得するには、直接方位が180°未満の場合は直接方位に180°を追加する必要があります。180°を超える場合はこの値を減算します。
たとえば、孤独な木への直接の方位角は330°であり、逆方位角は330°-180°\u003d 150°になります。
コンパスを使用して地形の方位角を決定するには、基準点に向かい、方向を決定する必要があります。 コンパスレバーを放し、矢印の北端をリングのゼロ分割と組み合わせます。 コンパスボックスを固定したまま、矢印がゼロ分割から離れないようにしながら、方位角を決定する必要があるオブジェクトに正面の視界が向けられるまで照準器を回転させます。 彼らは、三角形のポインタがどの数字で止まったかを知っています。 これが望ましい方位角になります。
なじみのない地域では、事前に定義された方位角で移動する必要があります。 これらの場合、コンパスの助けを借りて、特定の方向のランドマークを探す必要があります。 これを行うには、コンパスを動作状態にし、方位角をカウントし、この方向で特定のオブジェクト、基準点に注目します。 このランドマークに移動すると、観測者は特定の方位角をたどり、コンパスに沿って時折方向を制御します。 森林や夜間では、地元のランドマークが見えないという事実により、方位角の動きは複雑になります。 これらの場合、指向性コンパスは常に自分の前に置かれ、コンパスの特別な発光点が示す方向に夜に動きます。
したがって、方位角の動きの本質は、与えられた方位角の地形上の望ましい方向を見つけ、コンパスの助けを借りてそれに耐え、意図した地点に正確に出る能力にあります。 建物、個々の木、パイプなど、遠くに目立つオブジェクトが多くある広い視野のオープンエリアでコンパスを操作するトレーニングを実施すると便利です。生徒はチームで作業します。 最初に、ある人が方位角を決めてランドマークを呼び出し、別の人が地面に方位角を置いてランドマークを探し、3人目が逆方位角を決定します。
ランドマークをすばやく特定するには、メモリ内で水平線のメインサイドと中間サイドの方向を度で知る必要があります:北-0°、東-90°、南-180°、西-270°、北東-45°、南東-135° 、南西-225°、北西-315°。
日中のオープンエリアでの徒歩の方位角の本質と順序。
方位角の動きの本質は、指定されたポイントへの正確な出口である地形上の特定の方向と距離を見つけて維持することです。
方位角の移動に必要なデータは、最大規模の地形図に用意されています。
図 1方位角運動のデータの準備
方位角運動のデータの準備には次が含まれます。
地形図上のエリアの研究;
移動経路とそのセクションの中間ランドマークの選択;
選択されたランドマーク間の方向と距離の磁気方位角の決定。
地図上にデータを作成するか、移動経路の図を作成します。
ターンで明確なランドマークを備えたルートマップがマップ上にマークされ、ルートの各直線セクションの方向角と長さが測定されます。 方向角は磁気方位角に変換され、徒歩で歩くときの距離-車で行進するときのステップのペアで-速度計で。 方位角の動きのデータは地図上に作成され、それがない場合は、テーブルでルート図を作成します。
事前にコンパイルされたルート図に従って徒歩で方位を歩くことは、次の順序で実行されます。最初のランドマーク(1)(図1)で、コンパスを使用して、ランドマーク2への移動方向の方位を決定します。 動き始めます。
ランドマーク(2番)に到達し、その場所を指定すると、再び次のランドマーク(3番)へのコンパスによって移動方向を決定します。
方位角で走行するときのルートの分岐点への出口の精度は、地形の性質、視界条件、移動方向の決定と距離の測定の誤差に依存します。
通常、退出する必要があるターニングポイントからの偏差は、移動距離の1/10を超えません。つまり、移動距離1キロメートルあたり100 mです。
したがって、指定された距離を過ぎて、目的のランドマークが表示されない場合、半径が前の転換点から移動した距離の1/10の円内で探索する必要があります。
たとえば、冬季に方位角でスキーをする場合、距離はほぼ時間と速度で測定されます。 不正確な距離測定による方位の損失を避けるために、転換点で遠くからはっきりと見える補助ランドマークを選択する必要があります。
移動方向に簡単に耐えるために、中間の方向に加えて、補助ランドマークがよく使用されます。 これらのランドマークは通常、天体、つまり太陽、月、明るい星です。 天体(北星を除く)は空を動き回るので、それらを使用する場合、約15分後に移動方向の方位角を確認する必要があります。 制御されずに長時間その方向に移動すると、ルートから大幅に逸脱する可能性があります。
障害物回避。 帰り道を見つける。
バイパスの順序は、障害物のサイズと性質によって異なります。
障害物の反対側が見える場合
(図2)、ポイントAで、渡されたステップのペアの数が記録されます。 次に、障害物の移動方向の反対側にランドマーク(ポイントB)が表示されます。
方法の1つは、目的のランドマークまでの距離を決定し、この距離をステップのペアに変換し、ルートAに沿って以前に測定された距離に追加します。
その後、境界に沿って障害物を迂回します。 ポイントBでは、指定された方位角で、目的の方向を見つけて、ルートの次のターニングポイントに移動し続けます。
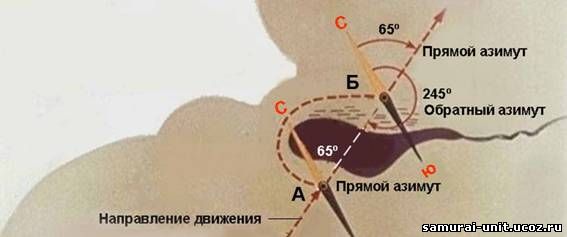
図 2.反対側が見える場合の障害物のバイパス
障害物の反対側が見えない場合
(図2)、ポイント1への出口で地形を調査し、障害物を回避しやすい側面の輪郭を描きます。 その後、障害物の境界に沿った方向の方位角(145°)がコンパスによって決定され、動きが始まり、ステップのペア(180 ps)を追跡します。 この場合、動きの真直度を厳密に維持する必要があります。
ポイント2(地面上の任意のポイント)の障害物の右境界で停止し、メインルートの方向(65°)に対応する方位角の移動方向を決定します。 この方向に、障害物を出るまで(ポイント3に)移動します。
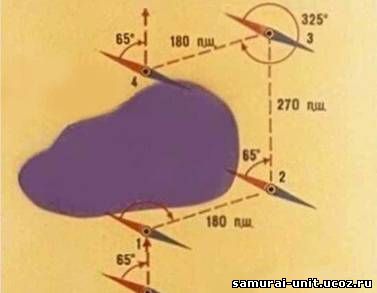
図 3.平行四辺形の障害物回避
ポイント3で、線1-2に平行な移動方向、つまり方向1-2(325°)の逆方位が決定されます。
行3-4の方向に移動して、行1-2で測定されたものと等しいステップのペアの数、つまり180ペアのステップをカウントします。
ポイント4では、障害物(65°)に到達する前の動きの方向に対応する動きの方向が方位角によって決定されます。
次に、ポイント1に対して測定されたステップのペアの数に、1-2の距離(270ペアのステップ)を追加し、ルートの以前に指定された分岐点まで移動し続けます。
場合によっては、たとえば、戻りパスを見つける(開始点に戻る)には、次を使用します。 逆磁気方位180°直接とは異なります。
逆方位を決定するには、180°未満の場合は直接方位に180°を加算し、180°を超える場合は180°を減算する必要があります。
ポイント5からポイント1(図1)に戻るための戻り方位角は次のとおりです。
| ポイント番号 | 道路の伸び | 磁気方位角(度) | 距離(ステップのペア) | 逆磁気方位角 |
| 1 | 交差点-測地ポイント | 83 | 1266 | 88+180=268 |
| 2 | 調査ポイント-広い | 73 | 1360 | 73+180=253 |
| 3 | 広い-納屋 | 105 | 1499 | 105+180=285 |
| 4 | 納屋-石 | 67 | 980 | 67+180=247 |
戦闘状況では、多くの場合、道路なしで、閉じた地形(森林、茂みなど)で、夜間、吹雪または霧の中で、指示物がないか、まったく見えないときに移動する必要があります。 このような場合、いわゆる磁気方位に沿ってコンパスの助けを借りて移動する必要があります。
磁気方位角は、ローカルオブジェクトへの任意の方向とコンパスの針の北端の方向によって形成される角度です。 方位角は、時計回りに0〜360度の角度で測定されます。北の地点から東、南、西、そして再び北の地点までです。 図 168は、方位角を示しています。落葉樹-50度、工場パイプ-135度、岐路-210度、針葉樹-330度。
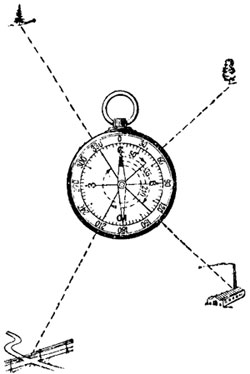
図 168地上の方位角の決定。
地上の方位角を決定するには、次のものが必要です。方位角を決定したいオブジェクトの方向に人になるため。 コンパスの方向を定めます。つまり、コンパスの針の暗い端の下にゼロ区分または文字Cを入れます。 コンパスのガラスカバーにマッチまたは短い細い棒をコンパスの中心から対象に向けて置き、対象に面するマッチの下部(手足)でコンパスの下部(四肢)の方位値を読み取ります。
ランドマークからランドマークへの移動方向は、マップ上の方位角を計算することで事前に決定できます。 マップから方位角を決定するには、方位角を決定する点にコンパスの中心を設定し、別のコンパスのボックスの下部にある南北線を、マップの上端に文字Cが付いたマップのサイドフレームと結合します。 (2番目のコンパスがない場合は、方位角が求められる地点、つまりマップのサイドフレームに平行な線を事前に描画する必要があります。)
道路などの特定の方向に対するコンパスのダイヤルの目盛りは、方位角の大きさを示します。 図 169 ZosenzaからMikhaylovtsyへの高速道路の2番目の膝の方位角は50度です。
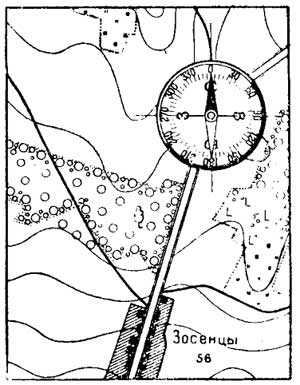
図 169.マップ上の方位角の決定。
特定の方位角での地面の方向は、次の方法で決定されます。
コンパスのガラスカバーにマッチが置かれ、一方の端がコンパスの中心に向かい、もう一方の端が特定の方位に対応するダイヤルを分割することを目的としています。 次に、コンパスを回転させて、四肢のゼロ分割が磁気針の北端の下になるようにします。
方位角は、方向を決定するだけでなく、特定の方向に移動するのにも役立ちます。
ある地点から別の地点へのパスが順方向にある場合、地面または地図上でこの方向の方位角を決定し、コンパスを使用してそれに沿って移動するだけで十分です。 方向から外れないようにするには、コンパスの正しい動きをより頻繁に確認する必要があります。
時々、直線ではなく、破線で行かなければなりません。 この場合、移動経路を地図または紙に正確に描き、描画し、パス全体をセクションに分割して、各セクションの方位角と範囲を決定する必要があります。 この作業がどのように行われるかを図に示します。 170.ここでは、1キロメートルのポストから納屋を通り、レンガ工場を通り、フォレスターの家までの道があります。 次のように移動する必要があります:開始点(キロメートルの列)で、最初のセクションの方位角(335°)にコンパスを設定し、パスの方向で他のオブジェクトと異なるオブジェクト(乾燥した枝のある木、特別な色の茂みなど) )、この主題に行き、方位角で再び方向を決定します。
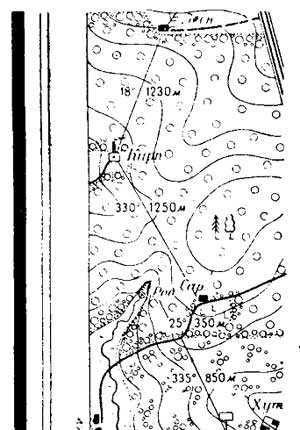
図 170.方位角の動き。
閉じたエリアを移動する場合(この例では、納屋からレンガ工場、工場から森林管理者の家まで)、ステップを追跡する必要があります。 マップで決定されたステップ数が過ぎて、ランドマーク(工場または森林管理者の家)が見えない場合は、移動中に正しい方向から外れたため、ランドマークをどこか近くで探す必要があります。
途中に障害物がある場合(たとえば、波状の場所)、障害物の反対側で、パスアジマスの方向にあるオブジェクトに注意し、障害物を迂回して、通知されたオブジェクトから離れ続ける必要があります。
森を移動するときは、コンパスを目の前に保ち、指定された方位角の方向に移動する必要があります。 夜、特定の方位角にある物体に気付かない場合は、明るいコンパスを使用します。
方位角とは? これは、与えられたオブジェクト(ランドマーク)の北から時計回りの方向で測定された角度です。 方位角 0から360までの度数で測定されます。地理的な経線が初期方向として使用される場合、方位角はtrueと呼ばれます。 磁気子午線を初期方向としてとると、方位は磁気と呼ばれます。
方位角の動き
それは、地上で望ましい方向を決定することにあります 与えられた方位角 目的の地点への出口に向かう途中でこの方向を維持します。 方位角に行くとき、彼らは通常、閉ざされたエリアまたはオフロードに頼ります。そこでは、磁気方位角とランドマークまでの距離がマップ上で事前に決定されます。
中間のランドマークトラフィック
方位角で運転する場合、実用的 ランドマーク精度 通常、移動したルートの10分の1になります。 したがって、ルート上の中間のランドマークを概説することを常にお勧めします。 これを行うには、移動する前に、コンパスの照準器を目的の方向に向け、方向を合わせます コンパス。 次に、彼らは正しい方向(またはその隣)に、はっきりとした、それほど遠くないランドマークを指し示します。 届く ランドマーク 、操作が再び繰り返されます。 方向を決定するとき、コンパスの針の北端がその手足の北マークと一致することを確認する必要があります。
方位角で運転する場合、観光客は湖や岩場などの幅の大きな障害に遭遇する可能性があります。 一般的な方向を厳守するには、「膝」の数が最も少ない破線に沿ってそれらを迂回することが望ましい。 移動するときは、中間方位角の値とそれらに沿って移動した距離を明確に記録します。
正しい方向から外れないようにするには、移動の過程でノートブックシート(タブレット)に、コーナーと「膝」の長さのバイパスパスを描画すると便利です。
明確なランドマークのない動き
ランドマークがない場合
ツンドラ、草原、フィールドではありません 基準点、または視界が悪い場合は移動できます アライメント方法。 移動を制御する観光客は、グループの最後にいる方向を制御します:彼は観光客のチェーン全体を見て、その方向を 与えられた方位角 および-逸脱のタイムリーな警告。
太陽(月、星)の存在下で、これらの天体に対する方向の角度を測定することにより、方位角を移動できます。 30分ごとに、空の位置をコンパスを使用して明らかにする必要があります。 そのような方向のテクニックのうち、影で最も一般的な方向。
風の強い天候では、風の方向や水平線に対する雲の動きを覚えておくと便利です。
冬の広い広場では、雪に覆われた牧草地に沿って動きを調整できます。 密集した森林地帯では、方向を維持するために、左または右のいずれかで遭遇する障害物(木、茂み、瓦ble)を交互に避けることをお勧めします。
中間のランドマークがない場合、特定の方位角から特定の方向に意図的に逸脱することが役立つ場合があります。 ステップまたは移動時間に従って計算された最終的なランドマークまでの距離を計算した後、観光客は急に横を向き、新しい方向(特定の方位角で直接移動している場合のように、反対の2つではなく)で目的の地点を検索します。
遠い距離では、制限的な(横の)ランドマークの輪郭を描き、最終的なランドマークをできるだけ直線的に選択し、観光客の移動方向に向かって前方が広くなるように配置する必要があります。
方向が失われた場合
簡単なサイトでは、有名な場所に到達するまでグループとして前進し続けることができます。 これは、ルートの難しいストレッチでは実行できません。ここでは、盲目的に行くよりも、徹底的な偵察に時間を費やす方が良いです。
コンパス(ジャイロコンパス)を使用してパスの方向と目的のポイントへの正確な出口を維持し、移動距離を測定する動作は、 方位角の動き。
方位角の動きは、森林、砂漠、ステップ、およびランドマークが乏しい他の地域で使用されます。また、夜間にオフロードで操作し、視界が悪い条件で、マップを地形と比較して特定のポイントへの信頼できる出口が提供されない場合に使用されます。 小さなユニットとグループの司令官は、地図がない場合に方位角運動に頼ることもあります。
方位角の移動に必要なデータは、地図または航空写真に用意されています。
方位角の動き-これは、特に夜間や視界が限られている地形、貧弱なランドマークでの方向の主な方法です。 方位角の動きの本質それは、コンパスの助けを借りて、パスの目的の方向に耐え、意図したポイントに正確に出る能力にあります。 これは、磁気方位角によって与えられた方向の地形の正しい決定と、目的のルートの転換点間のマップによって決定された距離により達成されます。 動きの方向は磁気コンパスを使用して維持され、距離は段階的にまたは速度計によって測定されます。
方位角(磁気方位角と距離)での移動の初期データはマップによって決定され、移動時間は標準に従って決定され、ダイアグラムまたは(および)テーブルの形式で作成されます。 (これについては過去のクラスで話しました)。
コンパスによる方位角の決定。地上の方位角を決定するには、以下を行う必要があります。
対象の方向に人になる
方位角を決定します。
コンパスの方向を決めます。つまり、ゼロ除算をもたらします(または
文字C)コンパスの針の暗い端の下。
コンパスカバーを回して、照準器をオブジェクトに向けます。
対象物に面した照準器のポインターに対して方位角値を読み取ります。
地上の特定の方位角を決定するには、以下を行う必要があります。
コンパス照準器のポインターを、指定された方位角の値に対応する区分の上の点に設定します。
コンパスを回して、照準ポインターが前面に来るようにします。
ゼロ点が矢印の北端と一致するまで、コンパスで自分を回します。 照準のポインターの方向は、指定された方位角の方向になります。
視線とオブジェクト(ターゲット)への方向の組み合わせは、視線からターゲットへのビューとその逆のビューの複数の変換によって実現されます。 コンパスを目の高さまで上げることはお勧めできません。測定精度が低下します。 コンパスAndrianovnaを使用して方位角を測定する精度は、プラスまたはマイナス2-3°です。
図に示されているルートに沿って徒歩で組織されたグループの方位における運動の組織と順序を考慮してください。 55。
図 55.方位角の動きの順序
方位角でグループの動きを整理するとき、コンパスを決定し、動きの方向に耐えるガイドが割り当てられます。 さらに、ステップのペアを追跡するために2人が割り当てられます。 ダイアグラム(表)の距離がメートル単位で示されている場合、ステップサイズを考慮して、ステップのペアに変換されます。
ポイント1(納屋)で、コンパスフライのポインターが20°に設定され、磁気針のブレーキが解除されます。 次に、矢印の北端がゼロスケール分割に対して設定されるまで、コンパスを水平面で回転させます。 コンパスのこの位置での後方視界と前方視界を通る視線は、ポイント2(手押し車)への方向を決定します。 途中でこの方向に耐えるために、移動方向を維持するために使用される視線上に、いくつかの遠い中間ランドマークが注目されます。
移動を開始する前に、コンパスの針をブレーキにかけます。 移動は、中間基準点の方向に厳密に直線的に行われ、ステップのペアがカウントされます。 中間のランドマークでは、方向は再びコンパスによって決定され、その方位角は20°であり、遠隔の中間のランドマークに気づき、そこに移動します。 したがって、彼らは1230 mをカバーするまで移動します。マウンドが近づく前でも見える場合、サイトの最後の部分は中間ランドマークなしで通過します。
ポイントNo. 2では、方位は330度のコンパスによって決定され、中間の基準点が認識され、ステップのペアをカウントして動き始めます。 森林、砂漠、草原など、その地域に中間的なランドマークがない場合、移動の方向はコンパスによってのみ維持されます。 ポイント番号3で、方位角が25°である方向を決定し、この方向に道路の交差点(ポイント番号4)に移動して、ステップのペアをカウントします。
上記の例から、方位角ではあるが、あるランドマークから別のランドマークへの連続的な遷移によって移動が達成されることがわかります。
移動方向に簡単に耐えるために、中間の方向に加えて、補助ランドマークがよく使用されます。 これらのランドマークは通常、天体、つまり太陽、月、明るい星です。 天体(北星を除く)は空を動き回るので、それらを使用する場合、約15分後に移動方向の方位角を確認する必要があります。 制御されずに長時間その方向に移動すると、ルートから大幅に逸脱する可能性があります。
動きの方向を維持するために、軍用車両(スキー)の動きからの線形のランドマークまたはトレースも使用されます。
方位角で移動する場合のルートの転換点への出口の精度は、地形の性質、視界条件、方位決定の誤差、コンパスおよび距離の測定に依存します。 通常、移動しなければならないターニングポイントからの偏差は、移動距離の1/10を超えません。つまり、移動距離1キロメートルごとに100 mです。 したがって、指定された距離を過ぎて、目的のランドマークが表示されない場合、半径が前の転換点から移動した距離の1/10の円内で探索する必要があります。
場合によっては、たとえば、スキーで冬に方位角で運転する場合、カバーされる距離はほぼ時間と速度で測定されます。 不正確な距離測定による方位の損失を避けるために、転換点で遠くからはっきりと見えるランドマークを選択する必要があります。
障害物回避。 方位角に沿って移動すると、自然と人工の両方の障害物(地雷原、森林の残骸など)に遭遇する可能性があります。 したがって、方向を失うことなく障害物を回避できる必要があります。
バイパスの順序は、障害物のサイズと性質によって異なります。 障害物の反対側が見える場合(図56、a)、ポイントAで通過したステップのペアの数が記録されます。 次に、障害物の移動方向の反対側にランドマーク(ポイントB)が表示されます。 上記の方法の1つは、目的のランドマークまでの距離を決定し、この距離をステップのペアに変換し、ポイントAへのルートに沿って以前に測定した距離に追加します。その後、境界に沿って障害物をバイパスします。 ポイントBでは、指定された方位角で、目的の方向を見つけて、ルートの次のターニングポイントに移動し続けます。
場合によっては、障害物に近づいたときに障害物の背後にあるランドマーク(ポイントB)を特定するのが難しい場合があります。 ランドマークへの正しい出口を確認するには、ポイントAにメモを残します。たとえば、マイルストーンを設定したり、木に崖を作ります。 ポイントBに到達すると、ポイントLへの方向の磁気方位の大きさ(逆方位)が決定されます。これは、ルートのこのセクションの特定の移動方向の方位と180°異なります。 反対の方位角のポイントAにプロビジョニングし、この方向がポイントDの方向と正確に一致することを確認して、移動を続けます。
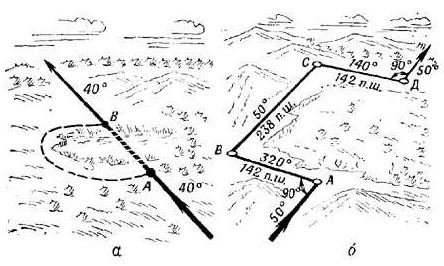
図 56.障害物の回避:
でも -障害物の反対側 見えるb-障害物の反対側 見えない
障害物の反対側が見えない場合は、ポイントD(図56、b)に出ると、地形を調べて障害物を回避しやすい側面の輪郭を描きます。 その後、障害物の境界に沿った方向の方位(320°)がコンパスによって決定され、動きが始まり、ステップのペアを追跡します(142 n。 この場合、動きの真直度を厳密に維持する必要があります。
ポイントB(地面上の任意のポイント)の障害物の左境界で、停止し、メインルートの方向(50°)に対応する方位角の移動方向を決定します。 この方向に、障害物を出るまで(ポイントCに)移動します。 点Cで、ラインABに平行な移動方向が決定されます。つまり、方向ABの逆方位角は140度です。 SDラインの方向に移動して、ラインABに沿って測定されたステップのペアの数、つまり142ペアのステップの数をカウントします。
ポイントDでは、障害物(50°)に到達する前の移動方向に対応する移動方向が方位角によって決定されます。 ポイントDで測定されたステップのペアの数に、航空機の距離(238 p.p.)を追加し、ルートの以前に指定されたターニングポイントまで移動し続けます。
したがって、方位角の移動は、不慣れな地域を移動する最も便利で正確な方法です。 その地域の磁気異常により不可能な場合、この場合、天体と局所物体に焦点を合わせて移動する必要があります。
テストの質問とタスク
(正解については付録1を参照してください)
1. 地図なしの地形の向きとは何ですか?
2.地平線のどちら側を知っていますか?
3.地図なしの向きの主な方法は何ですか。
4.地上の距離を決定する方法は何ですか?
5.方位角運動とは何ですか?
6.方位角の動きの準備と実行の順序。
7.障害物を回避するための手順。
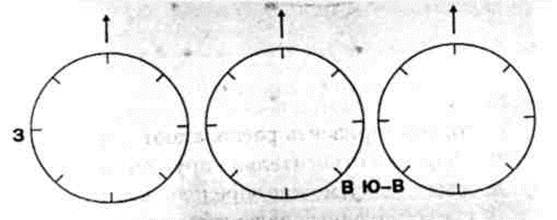
8.矢印が指す水平線の側面を決定します。
方位角は、任意の方向との間に形成される角度です
メトロエリアと北に向かう。
方位角は時計回りに0から360°までカウントされます。
コンパス方位
地上の方位角を決定するには、以下を行う必要があります。
-あなたが決定したい主題の方向に人になる
方位角;
-コンパスの方向を決めます。つまり、ゼロ除算をもたらします(または
文字C)コンパスの針の暗い端の下。
-コンパスカバーを回して、照準器を対象物に向ける
ny;
-被験者に面している照準器のポインターに対して、
方位値を読み取ります。
地上の特定の方位角を決定するには、以下を行う必要があります。
-コンパス照準器のポインターを合わせます
特定の方位角の値に対応する除算。
-コンパスを回して、照準ポインターが前面に来るようにします。
-コンパスでゼロになるまで
ポイントは矢印の北端と一致しません。 バイザー方向
paは、指定された方位角の方向になります。
視線とオブジェクト(ターゲット)への方向の組み合わせは、
視線からターゲットへ、またはその逆に複数回見ます。 ない
コンパスを目の高さまで上げることをお勧めします。
レニウム。 アンドリアノフコンパスを使用して方位角を測定する精度
プラスまたはマイナス2-3を与えます。
方位角の動き
特定の方位に沿って移動するには、次のものが必要です。
-交通の始点と終点の間の地形を地図上で研究する
zheniyaおよびローカルオブジェクトによって簡単に認識できるルートの概要。
-マップ上に選択されたルートを描画し、すべての方位角を決定します
ルートのリンク。
-マップ上の各リンクの長さを段階的に決定します(
平均の平均は1.5 mです。
-フィールドブック内の移動に関するすべてのデータを表形式で書き留めます
または概略図。
出発点に到着したら、次のことを行う必要があります。
-コンパスでナビゲートします。
-コンパスの可動リングのポインターを参照に対して設定します。
ルートの最初のリンクの方位角(この例では335ё)。
-ゼロ除算が一致するまでコンパスをスムーズに回します
矢印の北端で落下します。 照準器は
方位角の動きの方向を示します-335ё;
-この方向で、いくつかのオブジェクトを選択して続行します。 によって
被写体に到達したら、コンパスの向きを確認して続行する必要があります
最初のターニングポイントまで。
-最初のターニングポイントでは、コンパスの方位角を
次のターニングポイントと元のようにそれの上を移動します
段落。
分度器による地図上の方位角の決定
最初に、ルートに沿って選択されたランドマークは直線を結んでいます
しかし、この線が垂直線の少なくとも1つと交差するように
キロメートルのグリッド線。
次に、北の方向から角度を測定します
方向に時計回りにキロメートルグリッド線
件名に。 この場合、分度器はの垂直線に適用されます
分度器ライン上のリスク(ダッシュ)
描画方向が垂直線と交差する点と一致しました
キロメートルグリッドのカロリーライン、および分度器の極端な区分(0および
180)この線の方向と組み合わせる。
図では、「シェッド-渓谷」の方向では、方位角は65°で、
シェッドブリッジ方程式274ё080ё+94ё\u003d274ё)。
さらに、測定された角度を偏差の量だけ増減させる
磁気矢印、磁気方位角を取得します。
磁気針のずれまたは方向の修正は、角度と呼ばれます
キロメートルグリッドの垂直線とコンパスの針(磁石
子午線)。 矢印の赤緯は常に下に表示されます
ダイアグラムとテキストの形式のマップフレームの南(下)側。
磁気方位角の決定
上記とは対照的に、指向マップ上で実行されます
磁気偏角を考慮します。 磁気赤緯が発生または東
+記号または-記号付きの西部記号。 偏差の大きさと兆候を知る
マップシートのフレームの側面の1つの方向を組み合わせるのは簡単です(
西部または東部)真の子午線の方向
真の方向とマップフレームの側面の結合された位置で
子午線マップは正確に方向付けられます。
実際には、彼らは次のようにします:
-ラインのようにカードの片側にコンパスを取り付けます
コンパススケールの南北がフレームのこちら側の方向と一致し、ゼロ
(C)縮尺は、マップフレームの北側に向けられました。
-コンパスの針のブレーキを放し、針が落ち着いたら、回します
矢印が北端になるまで地図を描く
コンパススケールのゼロ除算(C)に対して、
-コンパスを移動せずにマップを回転して、矢印の北端が
kiは、赤緯の大きさと符号に対応する区分に反対しました
指定されたマップシート。
-このように方向付けられたカードは固定されています。
-基準点の直線を接続します。渓谷-納屋、納屋-石。
-ランドマークの間に描かれた線にコンパスを設定して、
スケールの南北線はこの方向と一致し、ゼロ除算
(C)移動に向けられた。
-矢印が落ち着いたら、北に対してスケールでカウントダウンします
矢印の終わり。 結果のカウントを360ёから引くと、この差は
磁気方位。
ランドマーク距離測定
ランドマーク間の距離の測定は、次のように実行されます。
-コンパスまたはルーラーを使用して、マップ上のセグメントの長さを決定します。
-マップスケールを使用すると、どの距離が対応するかがわかります
地上のセグメント;
たとえば、縮尺が1のマップでは、25,000、測定された距離
2つのランドマークは6.4 cmに等しく、目盛りは1 cmで250 mです。
距離は250 x 6.4 \u003d 1600 mになります。
移動に必要なデータは、特別にコンパイルされて作成されます
ルート図、または表形式。
動きは、動きの方向の望ましい方位角を見つけることから始まります。
移動の方向では、できるだけ選択して記憶することが望ましい
リモートのランドマーク。 移動中、移動距離をカウントします
(通常は数ステップで)。
この時点でランドマークが表示されない場合は、出口点に
サインをするか、1人か2人の戦闘機を作り、ランドマークを半径内に探します
前のランドマークから移動した距離0.1に等しい。
トラフィックでは、追加のランドマークが使用されます:電力線、
河川、道路など
障害物の回避は、状況に応じて、次のいずれかの方法で実行できます。
次の方法:
障害物を通して見える場合:
-反対側の進行方向のランドマークに注意してください
障害物なし;
-障害物を迂回し、観察されたランドマークから移動し続け、
何らかの方法で障害物の幅を決定し、距離に追加します
距離
森林の周りを歩くときなど、障害物を介した可視性がない場合
視界が限られている状況と同様に、霧、雨、
など
動きが方位角65で、停止する前だったとします
340ペアのステップが障害物で完了しました。 エリアを探索した後だった
右側をバイパスすることにしました。 コンパスの方位角を決定する
障害物に沿った方向(ポイント1からポイント2)、続行
この方向では、前の右境界までのステップのペアを数えます
金曜日 図では、方位角は145°、移動距離は180です。
ステップのペア。 ポイント2で停止した後、コンパスの方向を決定します
に沿って初期方位に対応
障害物まで(65番目)を超えて移動するまで移動し続けます
金曜日。 ステップ2は、ポイント2からその先のストップポイントまでカウントされます
障害物(ポイント3)。 図では、移動距離は270ペアです
ステップ。 ポイント3から、反対方向の左に移動します。
ポイント1からポイント2への等化(図では、逆方位は325°)
180ペアのステップの距離に達するまで(
4)を指す図。 ポイント4で、オリジナルに従って方向を決定します
方位角(65ё)および障害物までの移動距離の増加
ポイント2からポイント3までの距離は、新しい方向に移動し続けます
る。
戦闘機は、逆方位が直接方位と異なることを覚えておく必要があります
180度。 たとえば、Am \u003d 330、戻り方位角は330-180 \u003d 150 Amです。
\u003d 30、逆数は180 + 30 \u003d 210になります。
ステップのペアでのランドマーク間の各セクションの長さの変換:from
ランドマーク1からランドマーク2までは1200mです。 1200:1.5 \u003d 800 p.p. (1.5 m-中
2ペアのステップの長さ)。
検出されたオブジェクトをマップ
これはスカウトの仕事で最も重要な瞬間の一つです。 私たちから
オブジェクト(ターゲット)がどの程度正確にマッピングされるか、
その座標の決定。 このエラーにより、武器が発射されます
その場所に。
オブジェクト(ターゲット)を発見したら、スカウトは最初に
見つかったさまざまな兆候。 その後、監視を停止せずに
オブジェクトを表示せずに、オブジェクトをマップに配置します。
マップ上にオブジェクトをプロットする方法はいくつかあります。
眼球:オブジェクトは近くにある場合にマッピングされます
有名なランドマーク。
方向と距離によって:地図の方向を決めて、地図上のポイントを見つけます
あなたの立っている、マップ上で検出されたオブジェクトへの方向を掃引します
そして、線を引き、オブジェクトまでの距離を決定し、これを脇に置きます
地図上で立ち位置から溶ける。 結果のポイントは位置になります
マップ上のオブジェクト。 問題を解決することがグラフィカルに不可能な場合
(敵が干渉する、視界が悪いなど)、方位を正確に測定する必要があります。
オブジェクトにミュートし、それを方向角に変換して描画します
立ち点からの距離を延ばす方向への地図
オブジェクト。 指向角を取得するには、磁気方位角が必要です
このカードの磁気偏角を追加します(方向修正)。
ダイレクトセリフ。 このようにして、オブジェクトは2-x-3-xのマップに配置されます
彼を監視できる小切手。 これを行うには、それぞれから
開始点は、方向付けられたマップ方向に描画されます
オブジェクトの場合、線の交点がオブジェクトの位置を決定します。


















